核心提示
从人才政策来说,国家、广东省及东莞市规划及政策(见第一部分第三小节)均关注了工业机器人产业方面的人才培养,广东省及东莞市规划及政策注重人才引进及合作的开放性与灵活性,强调高技术人才或者学科带头人的国际化与多层次。针对工业机器人人才培养策略来说,开阔视野引进全球核心技术领域人是有效途径之一。以一流研究平台和领军人才吸引包括非华裔在内的全球高端科技人才,有利于组建具有核心攻坚能力的研究团队群。建议引导及推动广东相关企业与全球高校高技术人才进行合作,立足于广东省及开发区,深化技术交流及创新合作,从而全面提升整体创新水平。
报告从技术先进性与技术成熟度两个方面进行全球人才挖掘,推荐了6位机器人专家。专家在工业机器人领域上拥有持续体现技术先进度的高技术成果产出,且具有技术转移经验。报告推荐结果可用于企业欲寻找解决研发中相关技术问题的全球合作伙伴,或者欲提高相关领域学术水平的高校以提高学科建设水平。
专家列表如下:
中国——葛树志;
中国——谭民;
美国——乔治·怀特塞兹;
美国——谢普德·罗伯特;
日本——KOSUGE, KAZUHIRO;
日本——FUJIMOTO, HIROSHI。
推荐人才中,葛树志,谭民,KOSUGE, KAZUHIRO三位专家均在传统工业制造方面引入了人工智能技术,针对智能制造方面提供智力支持。乔治·怀特塞兹与谢普德·罗伯特在软体机器人方面有很大的成就,可运用于水下或者特殊环境的场景应用。
若针对工业机器人某个具体关键共性技术,前沿或者场景应用挖掘有进一步需求,厦门大学知识产权信息服务中心将从粗颗粒度的检索策略向细颗粒度方向调整制作更精细化的报告以适应需求。
一、 工业机器人产业概述
1. 工业机器人定义
国际标准ISO8373对工业机器人进行了解释:“机器人具备自动控制及可再编程、多用途功能,机器人操作机具有三个或三个以上的可编程轴,在工业自动化应用中,机器人的底座可固定也可移动。”
按照工业机器人的结构组成分类,工业机器人技术领域可分为机械结构、传感部分、控制部分、驱动部分以及关键部件部分。按照工业机器人用途分类,工业机器人则可分为搬运作业或上下料机器人、焊接机器人、喷涂机器人、加工机器人、装配机器人以及洁净机器人等。
2. 工业机器人人才需求分析
从工业机器人需求侧来说,基于以上市场规模与政策导向,工业机器人的市场需求旺盛。工业机器人产业具有高技术、高人才、高资金等门槛特征,机械本体、控制系统与驱动系统是其主要构成,且机器人在具体场景的应用遍地开花,产业是一项复杂的高科技系统工程,需要综合型的交叉学科理工科人才。人才发展是产业发展的核心竞争力,工业机器人人才的缺乏,直接导致工业机器人产量及质量,大部分核心技术仍然需要依赖国外,尤其在减速电机、伺服电机、控制器等核心零部件上,直接影响我国工业机器人的发展,需要建立一批高技术专业团队逐一攻破这些技术瓶颈[1]。
从人才供应侧角度来说,高校很难直接培养出有专业水准的工业机器人人才,开展工业机器人学科教学的院校、科研机构数量不多,人才供给规模有待提升。工业机器人相关专业毕业的学生还需要积累大量工程经验及相关设计数据才能从事机器人技术研发。从名校科班博士毕业成长到独当一面核心技术团队负责人,一般要在研发一线(前沿企业实验室或者和一线企业合作的科研院校实验室)潜心打磨10-15年以上,积累大量缄默知识并经历阶段性失败的锤炼[2]。
针对工业机器人人才培养策略来说,开阔视野引进全球核心技术领域人是有效途径之一。以一流研究平台和领军人才吸引包括非华裔在内的全球高端科技人才,有利于组建具有核心攻坚能力的研究团队群。
[1] 彭宽栋, 郑龙, 袁俊, et al. 基于工业4.0背景下的工业机器人人才研究分析及解决策略[J]. 价值工程, 2017(24).
[2] 铸造强国重器:关键核心技术突破的规律探索与体系构建[EB/OL]. http://3g.163.com/dy/article/EAIBHMHD0511D98B.html .2019-03-20
3. 工业机器人产业及人才发展概况
市场规模
美国,日本,德国,韩国和中国全球五大主要市场占2017年工业机器人总销量的73%[3]。中国2017年销量占榜首,比2016年增长59%,销售量约为138000台工业机器人,销量高于欧洲和美洲的总销量(112400台)。2013年,中国工业机器人使用密度为每万人25个,该数字在2016年增至68。全球来看,2016年中国工业机器人使用密度排名第23,尽快正在积极推进自动化,但仍然低于全球平均值:每万人74个[1]。
[1] 2017年工业机器人:中国,日本,韩国,美国和德国占总销量73%[EB/OL]. http://toutiao.manqian.cn/wz_a71pLmD0QX.html .2019-03-20
政策导向
目前中国工业机器人产业迎来了国家利好政策支持,产业政策环境良好,见表1工业机器人产业及人才主要相关政策。根据《中国制造 2025》和《广东省智能制造发展规划(2015-2025年)》,广东省于2015年和2018年分别制定了《广东省机器人产业发展专项行动计划(2015-2017 年)》和《广东省新一代人工智能创新发展行动计划(2018~2020年)》。从规划的内容表明,目前搬运、检测、装配、喷涂等领域智能工业机器人的开发应用是重点,广东省的机器人发展已经向智能化、场景化发展。
表1 工业机器人产业及人才主要相关政策
政策/文件 |
颁布时间 |
颁布单位 |
相关内容 |
《关于推进工业机器人产业发展的指导意见》 |
2013.12 |
工信部 |
到 2020 年,形成较为完善的工业机器人产业体 系,培育3-5 家具有国际竞争力的龙头企业和 8-10个配套产业集群;工业机器人行业和企业 的技术创新能力和国际竞争能力明显增强,高 端产品市场占有率提高到 45%以上,机器人密度 (每万名员工使用机器人台数)达到 100 以上, 基本满足国防建设、国民经济和社会发展需要。 |
《中国制造 2025》 |
2015.5 |
国务院 |
组织研发具有深度感知、智慧决策、自动执行功能的高档数控机床、工业机器人、增材制造装备等智能制造装备以及智能化生产线、工业控制系统、伺服电机及驱动器和减速器等智能核心装置,推进工程化和产业化。在重点领域试点建设智能工厂/数字化车间,加快人机智能交互、工业机器人、智能物流管理、增材制造等技术和装备在生产过程中的应用,促进制造工艺的仿真优化、数字化控制、状态信息实时监测和自适应控制。到2025 年,自主知识产权高端装备市场占有量大幅提升,核心技术对外依存度明显下降,基础配套能力显著增强,重要领域装备达到国际 领先水平。 |
《机器人产业发展规划(2016-2020 年)》 |
2016.4 |
工信部、国家发改 委、财政 部 |
到 2020 年,我国的机器人产业发展要实现形成 较为完善的机器人产业体系,技术创新能力和 国际竞争能力明显增强,产品性能和质量达到 国际同类水平,关键零部件取得重大突破,基 本满足市场需求。 |
《“十三五”国 家科技创新规 划》 |
2016.7 |
国务院 |
围绕建设制造强国,要大力发展机器人、智能 感知、智能控制、微纳制造、复杂制造系统等 关键技术,开发重大智能成套装备、光电子制 造装备、智能机器人、增材制造、激光制造等 关键装备与工艺,推进制造业智能化发展。开 展设计技术、可靠性技术、制造工艺、关键基 础件、工业传感器、智能仪器仪表、基础数据 库、工业试验平台等制造基础共性技术研发, 提升制造基础能力。 |
《广东省智能制造发展规划(2015-2025年)》 |
2015.7 |
广东省人民政府 |
(六)完善人才引进培养政策。 积极营造良好环境,培养一批具有国际领先水平的专家和学术带头人,培养和锻炼一批从事智能技术和装备研发的创新团队。探索高效灵活的人才引进、培养、使用、评价、激励和保障政策,优化人才引进和培养环境。建立重大智能制造项目与人才引进联动机制,建立重大项目产业人才的绿色通道。培养和造就大量面向高层次需求的实战型工程技术人才,提升在职人员劳动素质。深化产教融合,鼓励骨干企业与有条件的高等院校开展协同育人,培养大批在相关工程技术领域具有扎实素养的应用型人才。推动职业院校(技工院校)与制造业企业对接合作,提高技术技能人才培养的针对性、有效性。依托产业基地建设产业人才实训基地,开展人才定制培训,培训一批能操作、懂调试、会研究改进智能制造的实干型和应用型人才。 (七)积极参与国际合作。 深入推进全省智能制造企业对内对外开放,加快融入区域乃至全球产业链分工体系,积极参与新生产模式下的全球协同制造体系。鼓励引进一批龙头性、总成式、整机型高端智能制造装备项目,引导世界500强企业、中央企业在广东设立总部或区域总部、研发中心、营销中心等功能性机构。加快实施走出去战略,支持企业通过并购、重组、战略合作等多种形式,获取欧美发达市场知名品牌、营销渠道、高端人才等资源,充分利用两种资源、两个市场,加快发展成为具有国际竞争力的跨国公司。 |
《广东省机器人产业发展专项行动计划(2015-2017 年)》 |
2015.12 |
广东省经济和信息化委 |
到 2017年底,建设3-5个各具特色的省级机器人产业基地,引导企业、项目、人才、资金向基地集聚,形成高端企业集聚、产业链完善、配套服务齐全、整体竞争力强的产业集群,基地产值和增加值分别占全省机器人产业产值和增加值的比例达到50%以上。 (六)人才队伍建设计划 1、目标 2015年-2017年建设15个省级机器人安装维护与管理重点专业,建设3个省级机器人产业校企联盟,依托技工院校建设5个省级机器人产业实训基地。 2、重点任务 ①加大引才力度。在“珠江人才计划”实施过程中,以企业、高校和科研院所为平台,面向海外知名高校、研究机构和重点企业,大力引进机器人及相关领域创新创业团队和领军人才。 ②加强机器人工程师队伍建设。 ③加强技能型人才培训。 |
广东省新一代人工智能创新发展行动计划(2018~2020年) |
2018.10 |
广东省科学技术厅 |
选择装备制造、电子信息、五金家电、包装印刷等广东优势领域, 组织实施一批智能机器人推广应用示范项目,加强搬运、检测、装配、喷涂等领域智能工业机器人的开发应用,推进教育、娱乐、医疗、养老陪护等特定应用场景的智能服务机器人研发及产业化。 集聚一批人工智能高端人才。依托“珠江人才计划”、“广东特支计划”、“扬帆计划”等重大人才工程,引进一批人工智能基础理论、智能机器人、无人机等领域的高端领军人才与创新创业团队。依托重大科技专项、基地平台建设等,培育一批具有发展潜力的人工智能青年领军人才与科学家。推动人工智能龙头企业联合高校加强人才自主培养,形成一批掌握人工智能应用技术的复合型人才和团队。发展人工智能配套服务业。围绕人工智能产业发展需求,布局建设一批技术转移中心、检验检测中心、知识产权服务中心等公共技术服务平台。支持人工智能龙头企业牵头建立产业技术创新联盟和构筑专利池,开展人工智能技术研发、专利协同运用、行业标准制定等活动。鼓励高校、科研院所、企业等联合举办机器人或人工智能大赛,营造良好的创新创业氛围。强化人工智能知识产权保护。建设一批人工智能产业专利数据库和专利大数据应用服务平台,组织实施人工智能产业专利导航,推动人工智能产业知识产权集群管理,完善人工智能企业知识产权保护直通车制度,构建人工智能领域知识产权保护体系。到 2020 年,全省优选 50 家企业进入独角兽企业培育库,引进和培育人工智能领域高层次领军人才 30 人以上、高水平创新创业团队 20 个以上,人工智能配套服务体系基本建成,科技成果转移转化取得显著成效。 |
《东莞市工业机器人智能装备产业发展规划(2015-2020年)》 |
2015.7 |
东莞市人民政府 |
加强工业机器人智能装备人才队伍建设,逐步完善人才队伍结构,打造产业多层次人才聚集区。建立囊括东莞市、广东省、乃至全国范围内的工业机器人智能装备行业人才库,完善重要人才数据,形成完整的人才储备库;加快高层次人才引进,依托高等院校、专业研发机构和重点项目,以各种形式引进国内外学科带头人、海内外研发或管理人才来东莞市开展项目开发、技术合作和创业;设立机器人智能装备产业人才发展专项资金,通过创业奖励、安家费、医疗社保等方式资助领军人才和创业团队,吸引其来莞安家创业。 |
《松山湖促进机器人与智能装备产业 发展暂行办法》 |
2018.4 |
东莞松山湖高新区管委会 |
本办法扶持的机器人企业应满足以下条件: (一)企业主营业务属于工业机器人及系统集成、机器人核心零部件、服务机器人、特种机器人、工业自动化及智能装备研发生产销售范畴(以营业执照经营范围为准,以下简称“机器人企业”); (二)在园区注册成立且正常运营一年以上,具有独立法人资格、独立核算和纳税。 |
根据《关于实施“东莞制造2025造战略的意见》(东府〔2015〕1号)、《关于大力发展机器人智能装备产业打造有全球影响力的先进制造基地的意见》(东府〔2016〕1 号)、《强化新要素配置打造智能制造全生态链工作方案》(东府办〔2017〕12号)、《东莞市打造智能制造全生态链财政资助实施细则(试行)》(东府办〔2017〕98 号)和《东莞松山湖(生态园)国家自主创新示范区发展专项资金管理办法》,东莞松山湖高新技术产业开发区(以下简称“园区”)制定《松山湖促进机器人与智能装备产业发展暂行办法》(简称“暂行办法”)最大限度发挥财政资金推动机器人产业的扶持作用。暂行办法首次出台机器人产业领域扶持政策,加快打造智能制造产业全生态链、迈向高质量发展。从暂行办法看园区重点支持工业机器人的核心部件研发及其关键技术和整机项目,见表1的政策内容。
从人才政策来说,表1中的国家、广东省及东莞市规划及政策均关注了工业机器人产业方面的人才培养,广东省及东莞市规划及政策注重人才引进及合作的开放性与灵活性,强调高技术人才或者学科带头人的国际化与多层次。
二、 研究思路设计
1. 研究思路
报告将从技术先进性和技术成熟度两个方面分析进行主要竞争区域地区的工业机器人高技术高校人才挖掘。挖掘目标在于寻找从事工业机器人方面研究,具有和企业合作潜在意愿的高技术人才,推动产学研协同创新,深化校地企之间合作,全面提升整体创新水平。
首先,高校建立的研发团队开发的技术或者产品往往具有较高的技术先进性。报告从检索范围与数据时间跨度体现技术先进性:第一,选择高质量SCI核心数据库作为检索资源;第二,政府、经济带动下的新一轮工业革命发展迅速,因此报告选择工业机器人相关技术近五年数据(2014年-2019年)。
其次,依据机械、自动化等学科的校企常见合作方式及产学研常见的技术利用方式来看,专利许可、合作及转移机会多的情况下,科研团队进行技术输出或者人才输出的可能性较大。一方面,研究成果具有一定技术成熟度;另一方面,全球合作意愿较高。报告从专利转移、专利许可等专利利用情况体现技术成熟度。
2. 工业机器人技术分解
工业机器人由机械本体、控制系统与驱动系统三部分主要构成。
机械本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为机器人高科技产物关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。
驱动系统,是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。
控制系统,一种是集中式控制,即机器人的全部控制由一台微型计算机完成。另一种是分散(级)式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个 CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。
控制系统可技术分解为伺服驱动器,机器人控制器,传感器,供电装置,安全系统,通信接口,定位方法,离线编程,焊接机器人控制,码垛机器人控制,喷涂机器人控制,真空机器人控制,搬运机器人(AGV)控制,通信协议,自主监控,分布式智能控制,伺服驱动软件等。
报告主要选择工业机器人常用控制机械手部分作为分析对象,选择IPC分类号B25手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手。
3. 检索策略
表2 检索策略
策略 |
检索库 |
检索式 |
精炼依据 |
检索结果 |
1 |
SCI核心合集 |
TS=(robot* AND control* ) |
文献类型: ( ARTICLE ) AND 国家/地区: ( PEOPLES R CHINA OR USA OR SOUTH KOREA OR GERMANY OR JAPAN) AND 出版年: ( 2019 OR 2018 OR 2017 OR 2016 OR 2015 OR 2014 ) |
PEOPLES R CHINA 3856 USA 3254 SOUTH KOREA 967 GERMANY 829 JAPAN 806 |
2 |
智慧芽 |
IPC:B25 |
申请年: ( 2019 OR 2018 OR 2017 OR 2016 OR 2015 OR 2014 ) AND 法律状态(许可 OR 转移) |
PEOPLES R CHINA USA SOUTH KOREA GERMANY JAPAN |
报告结合技术先进度与技术成熟度选择区域人才的路线为:策略1->策略2。首先依据技术先进度,通过策略1了解近年拥有新技术不同国家的高校研究人员,从中选取成果影响力高的前30名研究人员;而后通过依据技术成熟度策略2筛选拥有专利利用的研究人员,了解研究人员合作潜力。
报告围绕路线分别在中国,美国,日本各区域进行检索得到结果,检索结果分析后得到区域分布人才,可见下一节。
三、 区域分布人才
1. 中国
(1)葛树志
葛树志在电子科技大学中担任研究生导师,主要从事机器人系统、非线性控制、智能控制系统及其工业应用的研究与开发,并做出了大量创新性的成果,2014年至今于SCI核心合集数据库共发表29篇文章,申请18件专利,其中16件发明专利。其基础技术主要Web of Science 类别分布为自动化控制系统(见图1),主要合作机构为新加坡国立大学(见图2),专利主要主题分布见图3。
其主要专利转移对象为中广核工程有限公司,合作开发的专利大多与核电废物处理相关(一种螺栓拧紧设备(公开号CN104002278B)、一种自动开封盖机器人(公开号CN104084948B)、一种圆形桶中心定位装置及其定位方法(公开号CN104229702B)、核电厂废物桶自动开封盖装置(公开号CN203566226U))。在IPC分类号B25下,主要研究内容也与核电相关。其中,一种自动开封盖机器人的专利权也转移给了中广核工程有限公司,该专利主要用于对多个目标桶(核电厂废物桶)桶盖的自动开封盖和存取的功能,能够弥补现有设备在灵活性、安全性、精确性和稳定性上带来的问题,也具有一定的创新性。

图1 Web of Science 类别分布

图2 葛树志合作主要机构
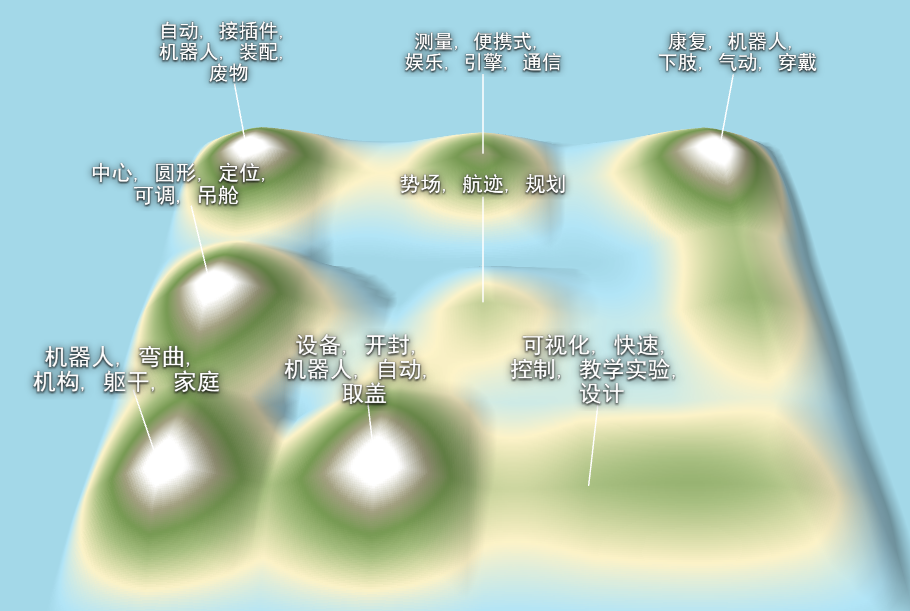
图3 葛树志专利主要主题分布
表3 葛树志许可/转移专利列表
公开号 |
专利名称 |
现专利权人 |
申请日 |
CN104002278B |
一种螺栓拧紧设备 |
电子科技大学,中广核工程有限公司 |
2014-06-18 |
CN104084948B |
一种自动开封盖机器人 |
电子科技大学,中广核工程有限公司 |
2014-06-27 |
CN104229702B |
一种圆形桶中心定位装置及其定位方法 |
电子科技大学,中广核工程有限公司 |
2014-06-18 |
CN203566226U |
核电厂废物桶自动开封盖装置 |
中广核工程有限公司 电子科技大学 中国广核集团有限公司 |
2013-10-24 |
(2)谭民
谭民在中国科学院自动化研究所担任研究生导师,主要研究方向为智能机器人和机器人控制,2014年至今于SCI核心合集数据库共发表29篇文章,申请70件专利,其中62件发明专利。其基础技术主要Web of Science 类别分布在电气与电子工程与自动控制系统(见图4),主要合作机构为德国汉堡大学(见图5),谭民专利主要主题分布见图6。
图4 谭民发文Web of Science 类别分布

图5 谭民发文合作主要机构
谭民大部分专利来自中国科学院自动化研究所。2000年至今谭民与多家机械相关公司都达成了合作,其中专利转移16件,专利许可8件,海关备案2件。2014年以后,专利CN105059511B转移给中科步思德(洛阳)智控科技有限公司,专利公开了一种结构简单、单关节的水下高仿真机器鱼机构与系统。2014年以前,多项专利进行了专利转移:专利“开放式工业机器人视觉控制平台”(公开号CN1289270C)转移给了北京国电智尧科技发展有限公司,该专利主要用于提高工业机器人的控制精度,可使现有的机器人生产更加适应现代化工业生产小批量多品种的要求。除此之外,专利“基于嵌入式语音模块的移动机器人智能运动控制系统”(公开号CN1508723A)对江苏同和涂装机械有限公司进行了授权,专利“基于多DSP并行处理的自主移动机器人系统”(公开号CN1219263C)对徐州海伦哲专用车辆有限公司进行了授权,这两项专利都与移动机器人相关,降低了移动机器人的整体成本,有利于拓展移动机器人的应用领域。
表4 谭民转移/许可专利列表
公开(公告)号 |
标题 |
当前申请(专利权)人 |
[标]原始申请(专利权)人 |
转移/许可 |
申请日 |
CN105059511B |
一种水下高仿真机器鱼 |
中科步思德(洛阳)智控科技有限公司 |
中国科学院自动化研究所(洛阳)机器人与智能装备创新研究院 |
已转移:中科步思德(洛阳)智控科技有限公司 |
2015-07-28 |
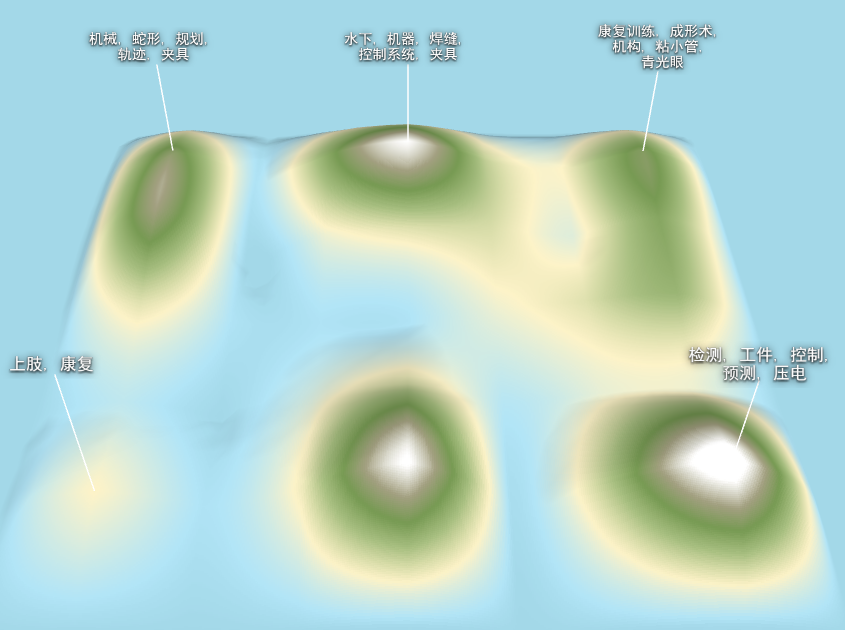
图6 谭民主要专利主题分布
2. 美国
(1)乔治·怀特塞兹
乔治·怀特塞兹(George M. Whitesides),美国化学家,哈佛大学教授,在有机金属化学、纳米技术、超分子组装、核磁共振谱学、物理有机化学、软光刻技术、微流体等诸多领域都有突出的贡献。截止2008年3月,怀特塞兹是所有在世化学家中h指数最高的一位。2014年至今,乔治·怀特塞兹已拥有4篇与软体机器人相关的ESI高被引文章,见表5,表明近期成果受到极大的关注,有一定全球影响力。
乔治教授与B25J9(机械手)相关的专利申请数量多达52篇,其中大部分专利都与软体机器人(Soft Robots)和软体制动器(Soft Actuators)相关(见图7),体现技术兼具先进性与成熟度,对软体机器人方面的研究处于世界领先地位。在13项权利转移的专利当中,受让人均为哈佛大学(PRESIDENT AND FELLOWS OF HARVARD COLLEGE),这与美国的专利开发模式基本上是学校自主开发有关系,成果学校自己享有。同时专利显示出了较强的技术创新性和较大的使用价值。2014年至今许可专利7件涉及机器人软体制动器,见表6。
表5 乔治·怀特塞兹ESI高被引文章列表
序号 |
ESI高被引文章 |
发表年底 |
1 |
An integrated design and fabrication strategy for entirely soft, autonomous robots |
2016 |
2 |
A 3D-printed, functionally graded soft robot powered by combustion |
2015 |
3 |
A Resilient, Untethered Soft Robot |
2014 |
4 |
Pneumatic Networks for Soft Robotics that Actuate Rapidly |
2014 |
表6 乔治·怀特塞兹的许可专利
公开(公告)号 |
标题 |
当前申请(专利权)人 |
[标]原始申请(专利权)人 |
转移/许可 |
申请日 |
US20160025669A1 |
STRETCHABLE IONICS FOR TRANSPARENT SENSORS AND ACTUATORS用于透明传感器和执行器的可扩展电子学 |
PRESIDENT AND FELLOWS OF HARVARD COLLEGE |
哈佛大学校长及研究员协会 |
被许可人:NATIONAL SCIENCE FOUNDATION |
2014-04-10 |
US9981377 |
Flexible robotic actuators 灵活的机器人执行器 |
PRESIDENT AND FELLOWS OF HARVARD COLLEGE |
哈佛大学校长及研究员协会 |
被许可人:NATIONAL SCIENCE FOUNDATION |
2014-09-08 |
US9850922 |
Soft buckling actuators 软屈曲执行器 |
PRESIDENT AND FELLOWS OF HARVARD COLLEGE |
哈佛大学校长及研究员协会 |
被许可人:NATIONAL SCIENCE FOUNDATION |
2015-04-13 |
US9790968 |
Soft actuators and soft actuating devices 软致动器和软致动装置 |
PRESIDENT AND FELLOWS OF HARVARD COLLEGE |
哈佛大学校长及研究员协会 |
被许可人:NATIONAL SCIENCE FOUNDATION |
2015-07-17 |
US9993921 |
Flexible and stretchable electronic strain-limited layer for soft actuators 柔性和可拉伸的电子应变限制层,用于软驱动器 |
PRESIDENT AND FELLOWS OF HARVARD COLLEGE |
哈佛大学校长及研究员协会 |
被许可人:NATIONAL SCIENCE FOUNDATION |
2015-08-21 |
US20170239821A1 |
Sensors for Soft Robots and Soft Actuators 软机器人和软执行器的传感器 |
PRESIDENT AND FELLOWS OF HARVARD COLLEGE |
哈佛大学校长及研究员协会 |
被许可人:NATIONAL SCIENCE FOUNDATION |
2015-08-21 |
US20180297214A1 |
Sensors for Soft Robots and Soft Actuators 软机器人和软执行器的传感器 |
PRESIDENT AND FELLOWS OF HARVARD COLLEGE |
哈佛大学校长及研究员协会 |
被许可人:NATIONAL SCIENCE FOUNDATION |
2016-01-12 |
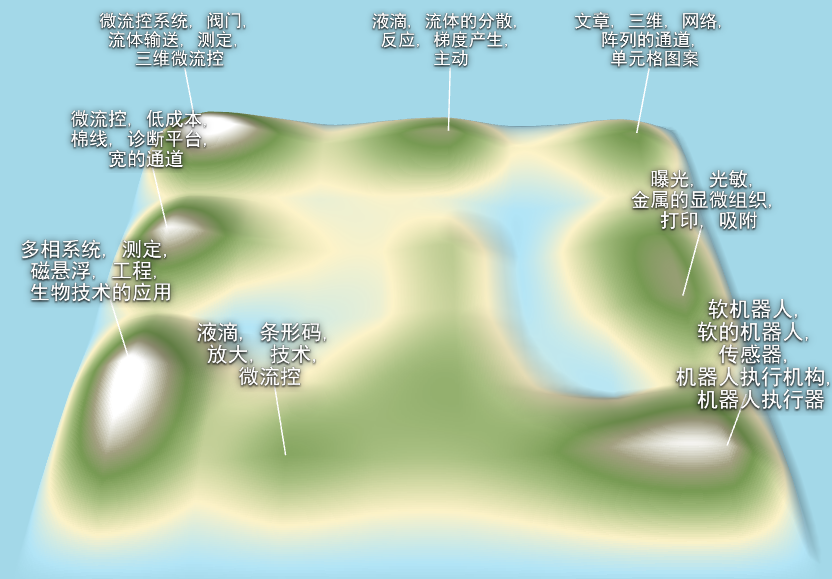
图7 乔治·怀特赛兹专利主要主题分布
(2)谢普德·罗伯特
谢普德·罗伯特(Shepherd, Robert F.),哈佛大学教授,罗伯特教授与B25J9(机械手)相关的专利大部分都与灵活的机器人制动器(Flexible Robotic Actuators)相关,见图8的专利主要主题分布。在7项权利转移的专利当中,受让人均为哈佛大学(PRESIDENT AND FELLOWS OF HARVARD COLLEGE),且专利价值评估水平与技术质量分均较高,显示出了较强的技术创新性和较大的使用价值。谢普德·罗伯特这些项目事实上均与乔治·怀特塞兹教授合作。在这些项目当中,专利号US9981377(Flexible Robotic Actuators)拥有最高的专利价值。
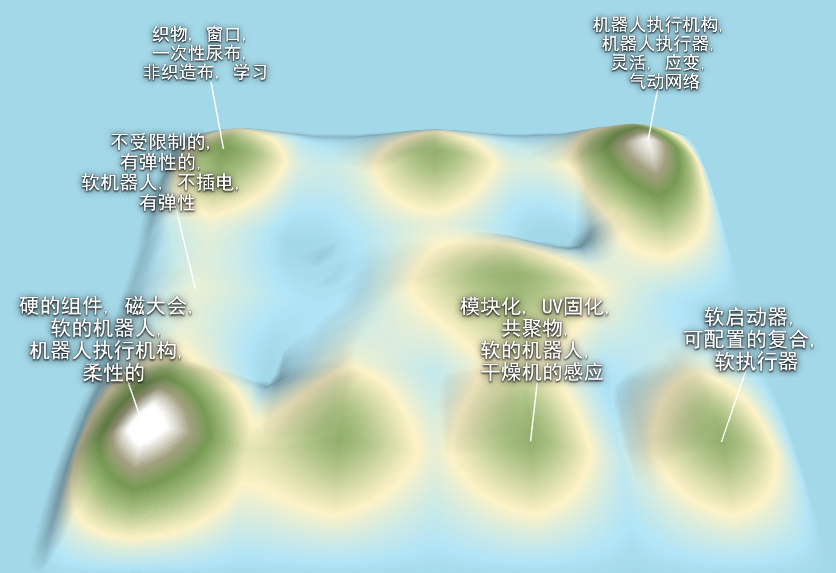
图8 谢普德·罗伯特专利主要主题分布
(3)乔治·怀特塞兹的其他合作者
表7 乔治·怀特塞兹的其他合作者专利及专利利用情况列表
名称 |
专利件数 |
转移数 |
转移公开号 |
许可数 |
许可公开号 |
Wood, Robert J. |
6 |
1 |
US8834666 |
|
|
Wehner, Michael |
2 |
2 |
US20150173993A1
US20150321339A1 |
1 |
US20150173993A1 |
Mosadegh, Bobak |
20 |
3 |
US9962832
US20180326578A1
US20170239821A1 |
|
US20170239821A1 |
Galloway, Kevin C. |
16 |
3 |
US10001149
US20170239821A1
US20190024679A1 |
2 |
US20170239821A1
US20170239821A1 |
表8 乔治·怀特塞兹的其他合作者专利合作情况
名称 |
专利件数 |
转移数 |
许可数 |
与Whitesides, George M.合作专利数 |
Wood, Robert J. |
6 |
1 |
|
|
Wehner, Michael |
2 |
2 |
1 |
0 |
Mosadegh, Bobak |
20 |
3 |
|
3 |
Galloway, Kevin C. |
16 |
3 |
2 |
1 |
Shepherd, Robert F. |
25 |
7 |
1 |
7 |
Whitesides, George M. |
52 |
13 |
7 |
— |
此外,其余一些转移专利较少的学者其研究主要领域也为软体机器人,且其发明专利技术质量分平均都较高,可见软体机器人是当代工业机器人发展的趋势,区别于传统机器人电机驱动,软体机器人的驱动方式主要取决于所使用的智能材料,行动将更加灵活便利。不仅如此,大部分专利都有乔治·怀特赛兹教授的参与,在一定程度上乔治·怀特赛兹教授对软体机器人方面的研究也处于世界的领先地位。除此之外,所有专利均转移至哈佛大学,表明哈佛大学不仅在专利发明的方面有所优势,在高校创新利用专利方面也有独特的优势。
3. 日本
日本学校开发专利的模式大致为学校与企业合作开发,开发出的成果由学校与企业共同享有,每个开发团队对应其中一家企业达成长期合作。
(1)KOSUGE, KAZUHIRO(小菅一弘)
KOSUGE, KAZUHIRO为日本东北大学机器人系教授。1980 -1982 年就职于日本电装有限公司;1982-1990年担任东京工业大学研究助理;1990-1995年担任名古屋大学副教授;从 1995 年起担任东北大学教授。他是电气与电子工程师协会(IEEE)、日本机械工程师学会(JSME)、日本仪器与控制工程师学会(SICE)、日本机器人学会(RSJ) 和日本汽车工程学会(JSAE)会员。他在2010-2011年担任电气与电子工程师协会机器人与自动化学会主席,2015-2016 年担任电气与电子工程师协会第十区专业分会主任。
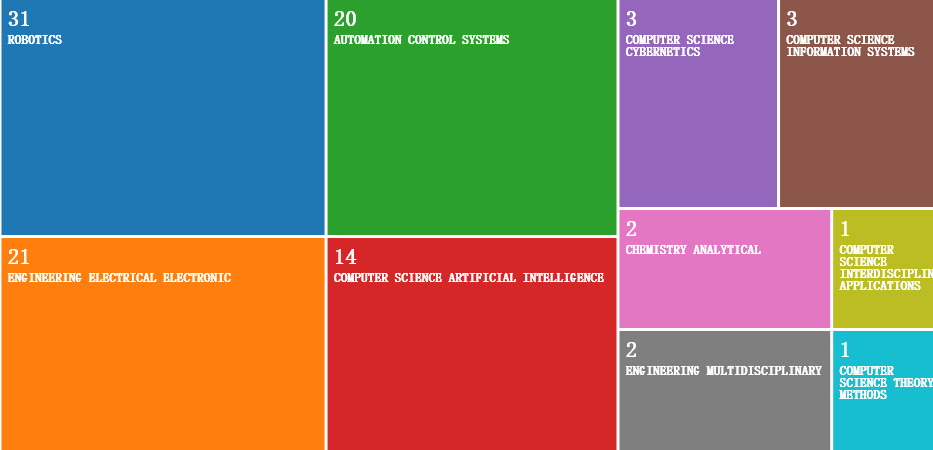
图9 KOSUGE, KAZUHIRO发文Web of Science 类别分布

图10 KOSUGE, KAZUHIRO发文合作机构
KOSUGE, KAZUHIRO 2014年以来发表相关SCI核心文章48篇,Web of Science 类别分布见图9,高技术自主研发能力较强(见图10),共发明45件专利(主题分布见图11),其中8件专利(见表9)已转移至精工爱普生公司(SEIKO EPSON CORPORATION),涉及机器人的控制核心关键技术,包括机械手和手爪等的控制,增强机器人工作的灵活性。专利多为与NAMMOTO, TAKASHI和SAKSENA, ABHILASHA二位合作完成发明。
表9 KOSUGE, KAZUHIRO的转移专利
公开(公告)号 |
标题 |
当前申请(专利权)人 |
[标]原始申请(专利权)人 |
申请日 |
US20160272354A1 |
PACKING APPARATUS AND PACKING METHOD |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2016-03-14 |
US20160306340A1 |
ROBOT AND CONTROL DEVICE |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2016-04-15 |
US9452537 |
Robot hand, robot, manufacturing method for robot hand |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2015-02-03 |
US9656388 |
Robot, robot system, control device, and control method |
SEIKO EPSON CORPORATION | TOHOKU UNIVERSITY |
精工爱普生株式会社 | 东北大学 |
2015-03-03 |
US9908237 |
Compliant motion control for robot |
SEIKO EPSON CORPORATION | TOHOKU UNIVERSITY |
精工爱普生株式会社 | 东北大学 |
2015-09-18 |
US9102059 |
Robot control method, robot control device, robot, and robot system |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2014-01-23 |
US20180085923A1 |
ROBOT CONTROL DEVICE, ROBOT, AND ROBOT SYSTEM |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2017-09-27 |
US9925668 |
Robot, control unit, and control method |
SEIKO EPSON CORPORATION | TOHOKU UNIVERSITY |
精工爱普生株式会社 | 东北大学 |
2016-04-07 |
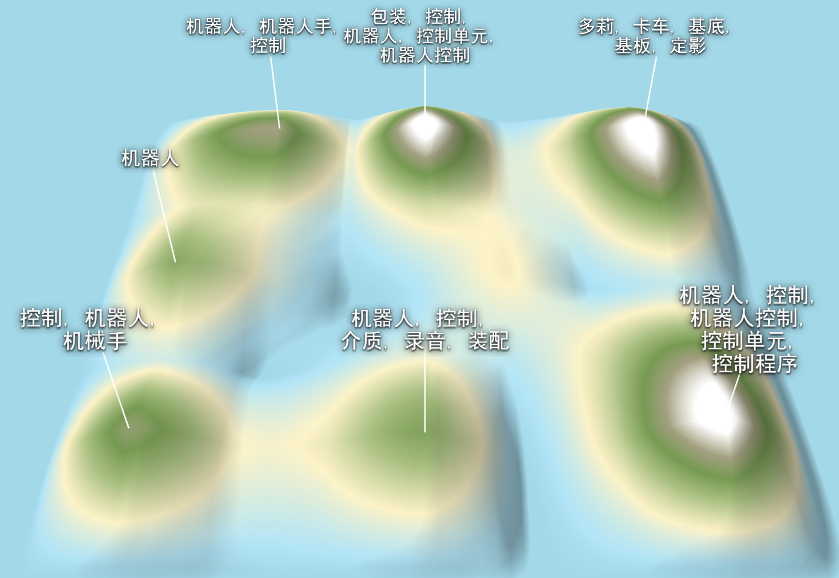
图11 日本KOSUGE, KAZUHIRO专利主要主题分布
(2)FUJIMOTO, HIROSHI
FUJIMOTO, HIROSHI为日本东京大学前沿科学研究所教授。FUJIMOTO, HIROSHI于2014年至今共发表50篇相关SCI核心文章,Web of Science 类别分布见图12,2014年至今24件专利,其中8件与INUKAI, KENJI共同开发的专利转移至东京大学与另一家公司(TOYOTA JIDOSHA KABUSHIKI KAISHA)(见表10),主要研发机械手控制。

图12 FUJIMOTO, HIROSHI发文Web of Science 类别分布
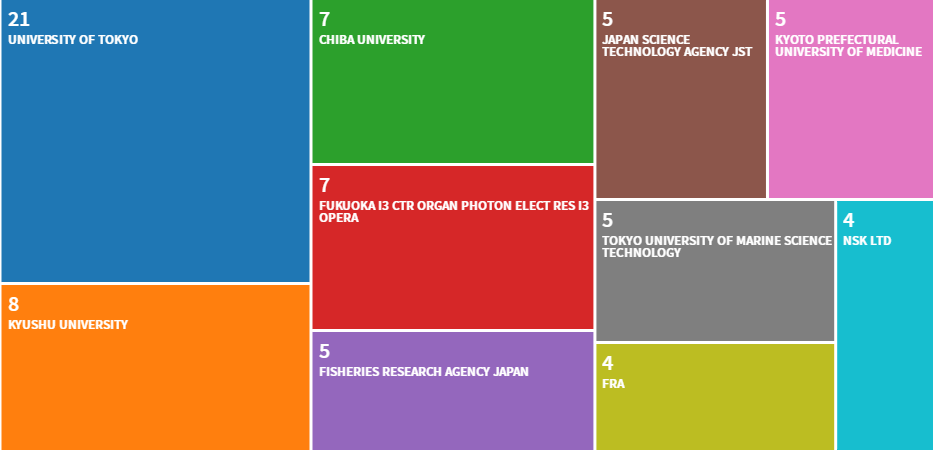
图13 FUJIMOTO, HIROSHI发文合作机构
图14 日本FUJIMOTO, HIROSHI专利主要主题分布
表10 FUJIMOTO, HIROSHI的转移专利
公开(公告)号 |
标题 |
当前申请(专利权)人 |
[标]原始申请(专利权)人 |
申请日 |
US20160306340A1 |
ROBOT AND CONTROL DEVICE |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2016-04-15 |
US9452537 |
Robot hand, robot, manufacturing method for robot hand |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2015-02-03 |
US9656388 |
Robot, robot system, control device, and control method |
SEIKO EPSON CORPORATION | TOHOKU UNIVERSITY |
精工爱普生株式会社 | 东北大学 |
2015-03-03 |
US9908237 |
Compliant motion control for robot |
SEIKO EPSON CORPORATION | TOHOKU UNIVERSITY |
精工爱普生株式会社 | 东北大学 |
2015-09-18 |
US9102059 |
Robot control method, robot control device, robot, and robot system |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2014-01-23 |
US20180085923A1 |
ROBOT CONTROL DEVICE, ROBOT, AND ROBOT SYSTEM |
SEIKO EPSON CORPORATION |
精工爱普生株式会社 |
2017-09-27 |
US9925668 |
Robot, control unit, and control method |
SEIKO EPSON CORPORATION | TOHOKU UNIVERSITY |
精工爱普生株式会社 | 东北大学 |
2016-04-07 |
US9457467 |
Control device, control method and control program |
THE UNIVERSITY OF TOKYO | TOYOTA JIDOSHA KABUSHIKI KAISHA |
藤本 博 | INUKAI KENJI | TAKAHASHI TARO |
2015-02-23 |
四、 总结
根据上述分析,报告得到以下结论:
(1)报告推荐6位机器人专家。专家在工业机器人领域上有持续体现技术先进度的高技术成果产出,且具有技术转移经验。专家列表如下:
中国——葛树志;(专长:特殊环境机器人)
中国——谭民;(专长:移动机器人)
美国——乔治·怀特塞兹;(专长:软体机器人)
美国——谢普德·罗伯特;(专长:软体机器人)
日本——KOSUGE, KAZUHIRO;(专长:机械手控制)
日本——FUJIMOTO, HIROSHI。(专长:机械手控制)
(2)技术引入人工智能。从采集数据时间范围来说,五年内体现技术先进度的成果转换成专利被利用的数量不多。目前,持有可实际利用专利的高技术人才在机器人研究领域已经耕耘多年,并且近年的成果持续产出,主要分布在自动化控制系统,电气与电子工程,计算机科学人工智能,机器人等Web of Science 类别。对应传统制造业,人工智能学科类别的引入在多个人才成果中有所体现,如葛树志,谭民,KOSUGE, KAZUHIRO。
(3)报告选用了“Robot*”和“control*”作为主题检索词进行检索,具有一定粗颗粒度,若需要针对工业机器人某个具体关键共性技术,前沿或者场景应用进行挖掘,将进一步细化,向细颗粒度方向调整检索策略。
五、 免责声明
第一,本报告中所陈述的内容均以客观文献为依据。
第二,我们按照厦门大学知识产权信息服务中心的章程进行文献检索、文献分析和审核,并作出上述结论和建议。
第三,我们获取的报酬与本报告中的分析、意见和结论无关,也与本报告的使用无关。
第四,本报告的结论和建议仅供参考。
报告撰写人:
厦门大学知识产权信息服务中心
2019年3月29日
